"Gear motors are the unsung heroes behind powerful robotic movements. Our high torque 12V DC motors combine compact design with impressive force output, making them ideal for demanding robotics applications that require precise control and reliable operation."
Table of Contents
Why Gear Motors Reign Supreme in High Torque Applications
In the heart of every powerful robot, automated machinery, or precision system lies a critical component that often goes unnoticed yet delivers the muscle needed for operation – the high torque gear motor. These compact powerhouses are the difference between a robot that struggles to lift a lightweight object and one that confidently manipulates heavy payloads with precision and control.
The Physics Behind Torque Multiplication
What makes gear motors the undisputed champions of torque delivery? The answer lies in basic mechanical physics. Unlike direct-drive motors that operate with a 1:1 ratio between motor rotation and output shaft movement, gear motors employ a series of interlocking gears to trade speed for torque – and the results are remarkable.
When you incorporate a gear reduction system into a 12V DC motor, you’re essentially leveraging mechanical advantage. Each time you reduce speed by half through gearing, you potentially double the available torque. This multiplication effect allows even modest-sized motors to generate impressive force at the output shaft.
For example, a typical 12V DC motor might produce 0.5 Nm of torque directly. Add a 10:1 gear reduction, and that same motor can theoretically deliver 5 Nm of torque – a tenfold increase that transforms a relatively weak motor into a robust actuator capable of moving substantial loads.
Comparing Torque Output: Direct Drive vs. Gear Motors
The difference between direct drive motors and high torque gear motors becomes most apparent when comparing real-world performance metrics:
Direct drive motors shine in high-speed, low-resistance applications. They’re excellent when velocity matters more than force – think cooling fans or lightweight spinners. But when you need to move something substantial or overcome significant resistance, they quickly reach their limitations.
In contrast, gear motors excel precisely where direct drives struggle. A 12V DC motor with high torque gearing can maintain steady power delivery even under significant load. This consistent performance under pressure is what makes them indispensable for robotics applications where unpredictable resistance is the norm rather than the exception.
Power Density Advantages in Compact Designs
Perhaps most impressively, modern high torque gear motors deliver their substantial power in remarkably compact packages. Through clever engineering and material science, manufacturers like Etonm Motor have developed gear systems that maximize torque while minimizing size and weight.
This power density is crucial for robotics applications where space and weight constraints are often as challenging as torque requirements. The ability to fit substantial mechanical advantage into tight spaces means designers can create more capable robots without proportionally increasing their size or mass.
Take planetary gear systems, for instance – these ingenious arrangements can fit multiple gear stages into a housing barely larger than the motor itself, delivering torque multiplication that would be impossible with simpler gear arrangements in the same footprint.
The space efficiency of advanced gear motors has enabled everything from compact robotic grippers with surprising strength to autonomous vehicles that can traverse difficult terrain without requiring massive drive systems. This balance of power and size is what continues to make high torque gear motors the go-to solution for engineers facing challenging design requirements.

Anatomy of a High Torque Gear Motor
Understanding the internal components of a high torque gear motor reveals why these mechanical marvels deliver such impressive performance in demanding applications. While often overlooked, the careful engineering behind these compact powerhouses represents decades of refinement and innovation.
Gear Reduction Mechanisms Explained
At its core, a high torque gear motor combines a standard electric motor with a carefully designed gear train. The electric motor provides the initial rotational force, while the gear system transforms this input into the desired output characteristics – typically sacrificing speed to gain torque.
The magic happens in the interaction between different sized gears. When a smaller gear (pinion) drives a larger gear, rotation speed decreases while torque increases proportionally. This fundamental principle allows engineers to design gear motors that precisely match application requirements by selecting appropriate gear ratios.
Most 12V DC motors with high torque capabilities employ multiple stages of reduction. Each stage multiplies the torque effect, allowing for significant force amplification within a relatively compact housing. For instance, a three-stage gear reduction might reduce speed by a factor of 125 while theoretically increasing torque by the same factor (minus efficiency losses).
Planetary Gear Systems: The Torque Multipliers
Among various gear arrangements, planetary gear systems stand out for their exceptional torque density and efficiency. Named for their resemblance to planets orbiting a sun, these systems consist of:
- A central “sun” gear connected to the motor shaft
- Multiple “planet” gears that rotate around the sun gear
- An outer “ring” gear with internal teeth that meshes with the planet gears
This arrangement offers several advantages for high torque applications. First, because multiple planet gears share the load simultaneously, planetary systems can handle significantly higher torque than single-mesh gear arrangements. Second, the load distribution reduces wear on individual components, extending service life.
Perhaps most importantly for robotics applications, planetary gear systems maintain the motor and output shaft in perfect alignment. This coaxial design simplifies integration into robotic systems where space is at a premium and complex mounting arrangements are undesirable.
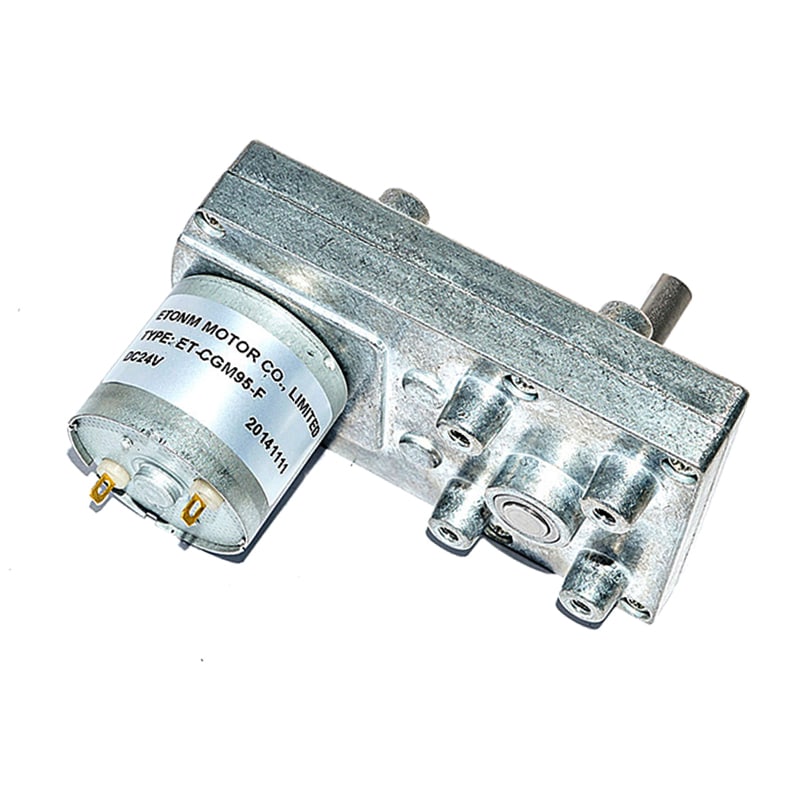
Worm Gear Designs for Self-Locking Applications
Another important configuration in the high torque gear motor family is the worm gear system. Unlike planetary arrangements, worm gears use a screw-like worm that meshes with a wheel gear, creating a 90-degree power transmission angle.
What makes worm gear motors particularly valuable in certain robotics applications is their inherent self-locking capability. When the gear ratio is sufficiently high (typically greater than 20:1), the friction between the worm and wheel prevents the output shaft from being back-driven. This means that once positioned, a robotic arm or other mechanism will maintain its position even when power is removed or external forces are applied.
This self-locking feature can eliminate the need for brakes in many applications, simplifying system design and reducing component count. For robotic grippers, articulated arms, and positioning systems, this natural holding torque represents a significant advantage.
The trade-off comes in efficiency – worm gear systems typically experience more friction and heat generation than planetary systems. However, in applications where holding position is critical, or where occasional rather than continuous operation is expected, this compromise is often worthwhile.
By carefully selecting the appropriate gear system – whether planetary, worm, or another configuration – engineers can optimize their high torque gear motors for specific robotic applications, balancing factors like efficiency, holding torque, size constraints, and cost considerations.
Powering Robotic Applications with 12V DC Motors
The intersection of high torque gear motors and robotics has created a revolution in what automated systems can accomplish. The versatile 12V platform offers an ideal balance of safety, power availability, and control precision that makes it particularly well-suited for a wide range of robotic applications.
Drive Systems for Mobile Robotics
Mobile robots face unique challenges that high torque gear motors are specifically equipped to handle. Whether navigating uneven terrain or carrying payloads, these robots require motors that deliver consistent power regardless of changing conditions.
The key to effective mobile robotics isn’t just raw power—it’s having the right torque available precisely when needed,” explains many robotics engineers. This is where 12V DC motors with high torque capabilities excel, providing the necessary pushing force to overcome obstacles without excessive current draw.
For wheeled robots, a properly matched gear motor ensures smooth acceleration, responsive control, and sufficient torque reserves for inclines or payload variations. The compact nature of modern gear motors allows designers to incorporate multiple drive units, creating differential steering systems or all-wheel-drive platforms without excessive weight or volume.
Precision Control in Robotic Arms and Grippers
Perhaps nowhere is the value of high torque gear motors more evident than in robotic manipulation systems. Arms and grippers require precise positioning combined with substantial holding force—a perfect application for gear-reduced motors.
In these systems, the gear motor’s ability to maintain position under load eliminates the need for constant power consumption to hold position. A well-designed 12V gear motor can provide both the dynamic movement capabilities needed for precise positioning and the static holding torque required once in position.
The compact form factor of modern high torque motors also allows for distributed actuation designs, where motors are placed at or near each joint rather than relying on complex transmission systems from centralized power sources. This approach reduces backlash, simplifies design, and improves overall system response.
Overcoming Inertia in Start-Stop Operations
One often overlooked challenge in robotics is managing the transition between stationary and moving states. Starting from rest requires overcoming inertia, which demands significantly more torque than maintaining motion at steady state.
High torque gear motors shine in these start-stop scenarios. Their torque multiplication provides the necessary force to initiate movement without stalling, while their gear reduction helps control deceleration when stopping.
For applications like conveyor systems, sorting mechanisms, or intermittent positioning devices, this characteristic ensures reliable operation even under variable load conditions. The ability to quickly reach operating speed from a dead stop improves cycle times and overall system efficiency.
By combining electrical power with mechanical advantage, high torque 12V gear motors provide the foundation upon which modern robotics continues to evolve, enabling increasingly sophisticated movement with remarkable precision and reliability.
Selection Guide: Matching Gear Motors to Your Torque Requirements
Selecting the right high torque gear motor for your robotics application isn’t simply about choosing the most powerful option available. It requires careful consideration of actual requirements, operational conditions, and system constraints to ensure optimal performance and longevity.
Calculating Torque Needs for Your Application
Determining the precise torque requirement is the first critical step in motor selection. For horizontal movement applications, the calculation typically involves:
- Torque = Force × Distance = Mass × Acceleration × Radius
For vertical lifting applications, you’ll need to account for gravitational forces:
- Torque = Mass × Gravity × Radius
Remember to include a safety factor (typically 1.5-2×) to account for unforeseen loads, friction, and efficiency losses. Underpowered motors lead to stalling and potential damage, while oversized motors waste energy and add unnecessary weight and cost.
For precise calculations, consider factors like:
- Starting torque requirements (usually higher than running torque)
- Peak load conditions versus continuous operation needs
- Mechanical advantages in your system that might reduce motor requirements
Gear Ratio Considerations and Trade-offs
The gear ratio directly impacts both the torque output and the speed of your system. Higher ratios provide more torque but reduce speed proportionally. This fundamental trade-off requires balancing:
- Speed requirements: How fast does your mechanism need to move?
- Torque requirements: How much force must be applied?
- Efficiency concerns: Higher ratios typically introduce more friction and losses
- Size and weight constraints: More reduction stages require larger gearboxes
Many robotics applications benefit from ratios between 20:1 and 100:1, but specialized needs might require ratios exceeding 300:1. The key is selecting a ratio that provides sufficient torque while maintaining adequate speed for your application.
Environmental Factors Affecting Performance
Even the perfect motor on paper can fail if environmental factors aren’t considered. Pay careful attention to:
Temperature range: High ambient temperatures reduce a motor’s effective torque output and lifespan. If operating in hot environments, consider derating your motor or selecting models with enhanced thermal management.
Duty cycle: Continuous operation generates more heat than intermittent use. Be realistic about your usage pattern—a motor rated for 25% duty cycle will fail prematurely if run continuously.
Vibration and shock: Robotics applications often involve movement and potential impacts. Ensure your selected motor can withstand the mechanical stresses it will encounter.
Moisture and contamination: For applications outside controlled environments, IP-rated motors provide protection against dust and moisture ingress, preventing premature failure.
By carefully analyzing your torque requirements, understanding the implications of different gear ratios, and accounting for environmental factors, you can select a high torque gear motor that delivers optimal performance for your specific robotics application—balancing power, efficiency, size, and cost effectively.
Etonm Motor's High Torque Solutions
In today’s competitive robotics landscape, having a reliable partner for motion control solutions can make the difference between project success and frustration. Etonm Motor has established itself as a specialist in providing high-performance gear motors that meet the exacting demands of modern robotics applications.
Customization Options for Specialized Applications
Unlike off-the-shelf solutions that force engineers to adapt their designs around available motors, Etonm Motor takes a different approach. Our engineering team works closely with clients to develop customized high torque gear motors that precisely match application requirements.
This customization extends beyond simple torque and speed specifications to include:
- Custom shaft configurations for direct integration with your mechanical system
- Specialized wiring harnesses and connectors to simplify installation
- Modified mounting options to fit space-constrained designs
- Enhanced environmental protection for challenging operational conditions
- Integrated feedback systems for closed-loop control applications
Whether you need planetary gear motors for their exceptional efficiency, worm gear designs for self-locking capabilities, or specialized hybrid configurations, our manufacturing capabilities can deliver solutions tailored to your unique specifications.
Quality Testing and Performance Guarantees
Every high torque 12V DC motor that leaves our facility undergoes rigorous testing to ensure it meets both our internal quality standards and your specific performance requirements. Our comprehensive testing protocol includes:
- Torque verification under various load conditions
- Speed and current draw measurements to confirm efficiency
- Temperature rise testing to validate thermal performance
- Endurance testing simulating real-world operating conditions
- Noise and vibration analysis for applications requiring quiet operation
This meticulous attention to quality control provides our clients with confidence that their motion systems will perform reliably when deployed in the field, minimizing downtime and maintenance requirements.
Success Stories: From Concept to Implementation
Our collaborative approach has helped numerous clients overcome challenging motion control problems. For example, a medical robotics company recently partnered with us to develop a compact high torque gear motor for their next-generation surgical assistance robot. The constrained space envelope and demanding torque requirements presented significant challenges, but our engineering team delivered a custom planetary solution that exceeded performance targets while fitting within the available space.
Similarly, an agricultural automation firm utilized our high torque worm gear motors to power their autonomous harvesting robot, taking advantage of the self-locking characteristics to maintain position even when power is removed – a critical safety feature for their application.
These success stories demonstrate our commitment to not just supplying components, but becoming a true partner in your development process, from initial concept through to production implementation and beyond.
By choosing Etonm Motor for your high torque gear motor needs, you gain access to not only premium components but also decades of specialized expertise in motion control solutions for the most demanding applications.
Conclusion: Powering the Future of Robotics
The evolution of high torque gear motors continues to push the boundaries of what’s possible in robotics engineering. As we’ve explored throughout this article, these compact powerhouses deliver the mechanical advantage necessary to tackle increasingly complex automation challenges while maintaining precision, reliability, and efficiency.
The relationship between torque requirements and gear motor selection remains fundamental to successful robotics design. By understanding the physics behind torque multiplication, carefully analyzing application requirements, and selecting the appropriate gear configuration, engineers can develop systems that perform optimally in even the most demanding environments.
For those developing next-generation robotic systems, partnering with specialists who understand the nuances of high torque applications can significantly streamline the development process. Etonm Motor’s expertise in custom 12V DC motors with high torque capabilities provides a valuable resource for innovators looking to overcome motion control challenges without compromising on performance or reliability.
Whether you’re designing autonomous mobile robots, precision manufacturing equipment, medical devices, or any application requiring controlled force application, the right gear motor forms the foundation upon which successful systems are built.
We invite you to explore how our high torque gear motor solutions can enhance your robotics projects. Our engineering team is ready to discuss your specific requirements and develop customized solutions that align perfectly with your design objectives.
Contact our technical team today to discuss your high torque motor needs, or browse our catalog of standard and customizable gear motor options designed specifically for robotics applications.
With the right partner and the right components, your next robotics innovation is just around the corner.
Explore Our 12v DC Motors





















Related Reading
- 12V DC Motor High Torque High RPM: Torque vs. Speed
- 12V DC Motor Shaft Design: Impact & Options
- 12V DC Motor with Encoder: Precision Guide for Beginners
- Low RPM Brushless Motor: Technical Specs & Customization
- What Determines the Speed of a Brushless DC Motor?
- Optimizing Brushless DC Motor Performance: The Role of Winding Configurations
- What Is DC Motor Torque? A Simple Guide by Etonm Motor
- 12V High Torque DC Motors: A Complete Guide To Power And Performance
- High Torque 12V DC Motor 2000 RPM | Custom 8mm Shaft Motors
- 12V Low Speed High Torque Motor: Ideal For DIY Projects
- Small But Mighty: Mastering Small High Torque 12V Motors